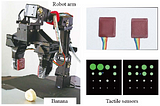
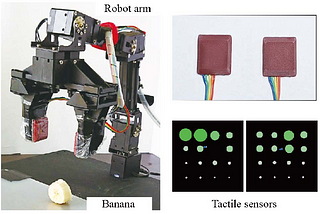
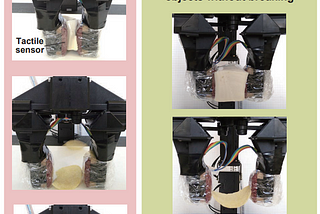
Published inOMRON SINIC X (JP)ICRA2023 に触覚に基づく脆弱物体把持メタ学習の論文が採択されました。ロボティクスと自動化に関する国際学会ICRA2023に学習に食材を使わない脆弱食材の把持学習に関する以下の論文が採択されました。オムロン…May 23, 2023May 23, 2023
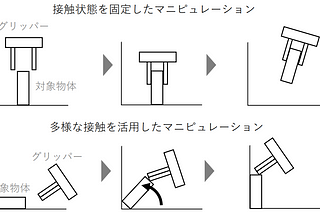
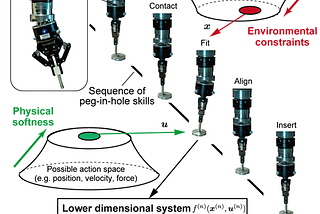
Published inOMRON SINIC X (JP)IROS2022に相補性条件を用いた物体操作の研究が採択されました国際会議 IEEE/RSJ International Conference on Intelligent Robots and Systems に、相補性条件を用いた以下の論文が採択されました。Oct 12, 2022Oct 12, 2022
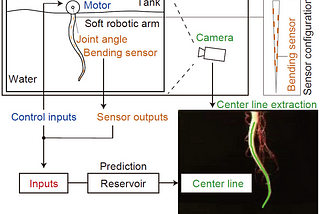
Published inOMRON SINIC X (JP)RA-L IROS2022 にリザバー計算による柔軟アーム姿勢推定の論文が採択されました学術雑誌 IEEE Robotics and Automation Letters および国際会議 IEEE/RSJ International Conference on Intelligent Robots and Systems…Oct 6, 2022Oct 6, 2022
Published inOMRON SINIC X (JP)破壊に学ぶ脆弱食材把持学習の論文が IEEE Access に採択されました。学術雑誌 IEEE Access に脆弱食材の把持学習に関する以下の論文が受理されました。Sep 28, 2022Sep 28, 2022
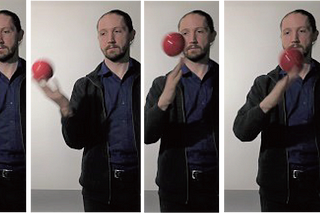
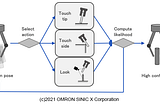
Published inOMRON SINIC XLearning Robotic Contact JugglingWe are happy to share that our project on robotic juggling in proceedings of the 2021 IEEE/RSJ International Conference on Intelligent…Oct 22, 2021Oct 22, 2021
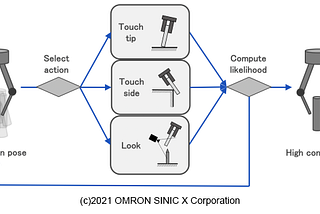
Published inOMRON SINIC XSoft robotic manipulationHow to manipulate an object under uncertainty with robots?Jul 19, 2021Jul 19, 2021
Published inOMRON SINIC XOMRON SINIC X at ICRA 2021The International Conference on Robotics and Automation (ICRA) is one of the top-tier conferences in robotics. At ICRA 2021, OMRON SINIC X…May 31, 2021May 31, 2021
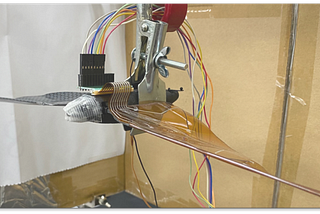
Published inOMRON SINIC X (JP)部品組立を行う柔らかいロボットの研究オムロンサイニックエックスのロボティクスグループで進めている製品組立を行う柔軟ロボット研究について紹介します。Mar 25, 2021Mar 25, 2021
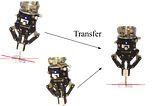
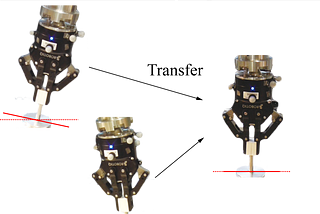
Published inOMRON SINIC XTRANS-AM: Transfer Learning by Aggregating Dynamics Models for Soft Robotic AssemblyWe are thrilled to share that our project on transfer RL has been accepted to The 2021 International Conference on Robotics and Automation…Mar 24, 2021Mar 24, 2021
Published inOMRON SINIC X (JP)AIS に物理リザバー計算を用いた風向き推定の論文が採録されました弊社で実施した物理リザバー計算を用いた風向き推定に関する研究論文が Advanced Intelligent Systems に採録されました。東京大学中嶋研究室、大阪府立大学竹井研究室との共同研究による成果です。Nov 11, 2020Nov 11, 2020